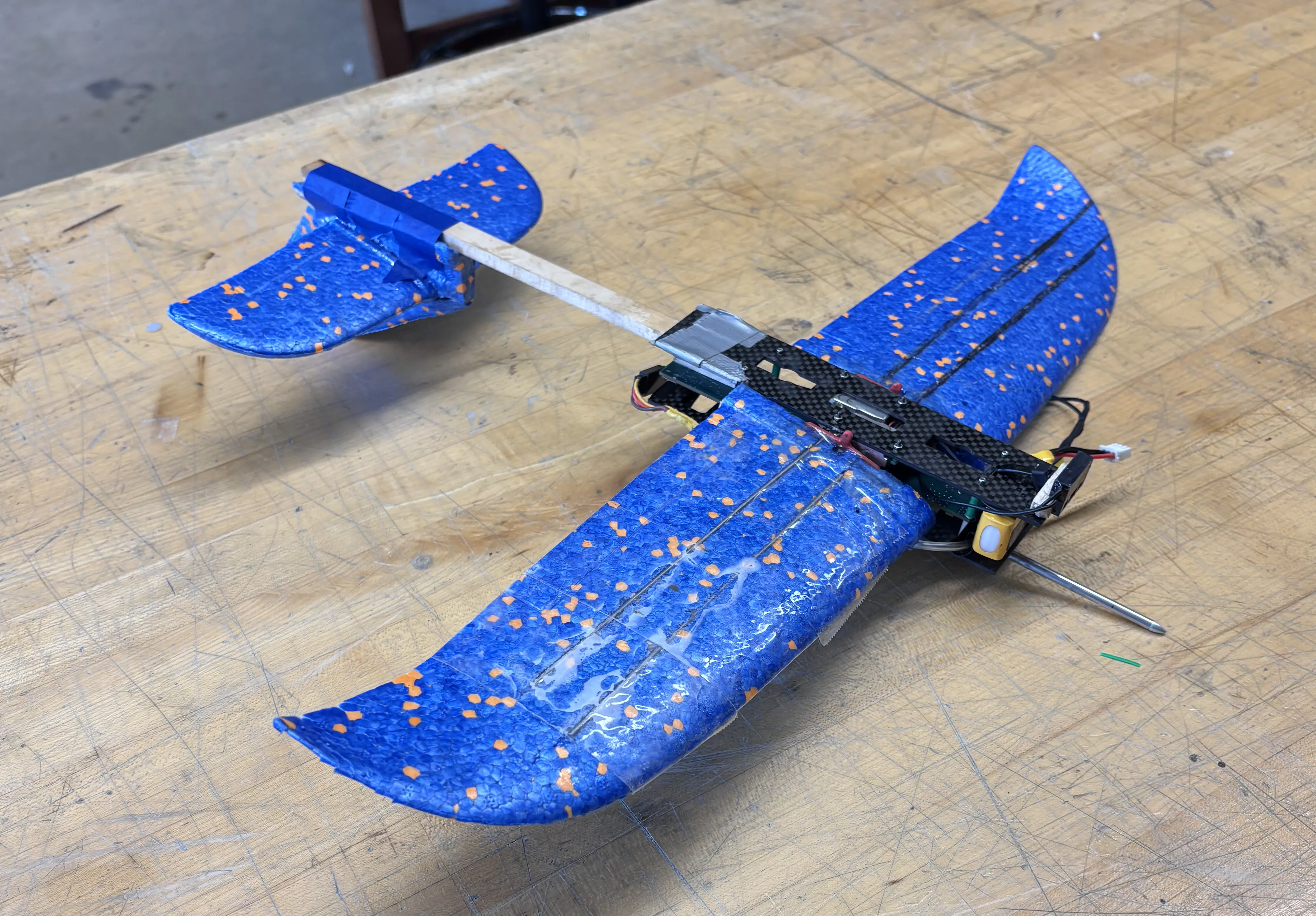
Final Glider Assembly
Test Outcomes
Flight testing was conducted in Tucson, AZ and at the South Bend Radio Control Club. During these trials, the glider performed a 180-degree turn after mid-air release and activated the strobe light system. Servo control was verified on the ground and in-flight. The data confirmed correct surface actuation.
The PCB's microSD card logged GPS coordinates, IMU orientation, airspeed, and control surface commands. The glider responded correctly to attitude and heading errors and adjusted its trajectory toward the target GPS coordinates.
During the competition, a structural interference prevented successful detachment of the glider and resulted in a failed mission. This mechanical issue was corrected in later tests by trimming the release clips. Post-fix trials showed successful deployments and flight control.
Tuscon Flight Test: Ground View
Notable Observations
- The strobe lights consistently worked after release and met competition requirements.
- Flight envelope protections activated as expected during roll and pitch limit violations.
- Flight data logs showed transitions between flight states and pitcheron actuation.
- Ground tests demonstrated working servo control and correct behavior of sensors.
Areas for Improvement
Aerodynamic Design and Flight Stability
While the glider's aerodynamic profile improved over the semester, further refinements could improve flight stability. Additional testing could lead to more optimal lift generation and a level descent. Additionally, the team could use a rudder, or split the elevator and aileron functions instead of relying only on pitcherons. This would theoretically increase control and allow for more stable simultaneous pitch and roll correction.
Release Mechanism
Although functional, the release mechanism occasionally failed due to mechanical interference with the aircraft mount. This was mitigated by trimming the clips connecting the glider, which greatly improved detachment reliability. However, a redesign could eliminate this issue entirely in future iterations.
Homing Algorithm (PID Controller)
The current system used only a proportional controller due to time and test limitations. While functional, the glider showed instability before locking onto the GPS vector. Implementing a full PID controller with tuned constants would reduce oscillations and improve stability. Furthermore, optimizing control surface responses based on airspeed would improve guidance accuracy during descent.
More Test Videos
South Bend Radio Control Club Flight Test: Ground View
South Bend Radio Control Club Flight Test: Aircraft View
Conclusions
This project successfully demonstrated the design, implementation, and testing of an autonomous glider system capable of mid-air release, strobe light activation, and guided descent toward a predefined landing zone. The team effectively used an ESP32 microcontroller and several peripherals to manage flight control surfaces, data logging, and flight state transitions within a FreeRTOS software architecture. This resulted in a glider that was capable of flying and operating without continuous user input.
The glider consistently displayed the maneuvers of a 180-degree turn and GPS-based heading adjustments during flight. Ground tests verified servo reliability and control logic. Flight tests confirmed the functionality of the systems including release detection mechanism, LED strobe light activation, and data acquisition. Although we experienced minor issues with the release mechanism, which inhibited the glider’s scoring at competition, this issue was addressed in later tests and resolved for a reliable result.
This project was an exploration into several important areas of research and showed the intersection of embedded systems and autonomous intelligence in an aerospace application. The team concluded that while the honing algorithm, release mechanism, and aerodynamic design still require refinement, the project was an overall success. Overall, the objectives laid out in the problem statement were achieved with the team having developed a lightweight glider capable of autonomous flight.