Project
The Project
A brief summary of the project and how it all works.
 The Notre Dame Robotic Football Club (RFC) is an on-campus club involved with building and piloting robots to play a game of eight on eight football against other universities. The rules are meant to mimic collegiate football as accurately as possible, especially when discussing player positions. One big difference in rules is that completing a successful pass yields 2 points for your team, so completing our project successfully was vital for the team. Last year’s team created a functioning indoor GPS system that would track one robot. We improved upon their system by allowing it to communicate with the RFC’s QB through I2C protocol, redesigning their board to make it smaller and more efficient, adding physical pylons to house the stationary responder units, and by converting the code used for Trilateration and positioning from python to C so the PIC32 would be able to do all the positioning calculations.
The Notre Dame Robotic Football Club (RFC) is an on-campus club involved with building and piloting robots to play a game of eight on eight football against other universities. The rules are meant to mimic collegiate football as accurately as possible, especially when discussing player positions. One big difference in rules is that completing a successful pass yields 2 points for your team, so completing our project successfully was vital for the team. Last year’s team created a functioning indoor GPS system that would track one robot. We improved upon their system by allowing it to communicate with the RFC’s QB through I2C protocol, redesigning their board to make it smaller and more efficient, adding physical pylons to house the stationary responder units, and by converting the code used for Trilateration and positioning from python to C so the PIC32 would be able to do all the positioning calculations.
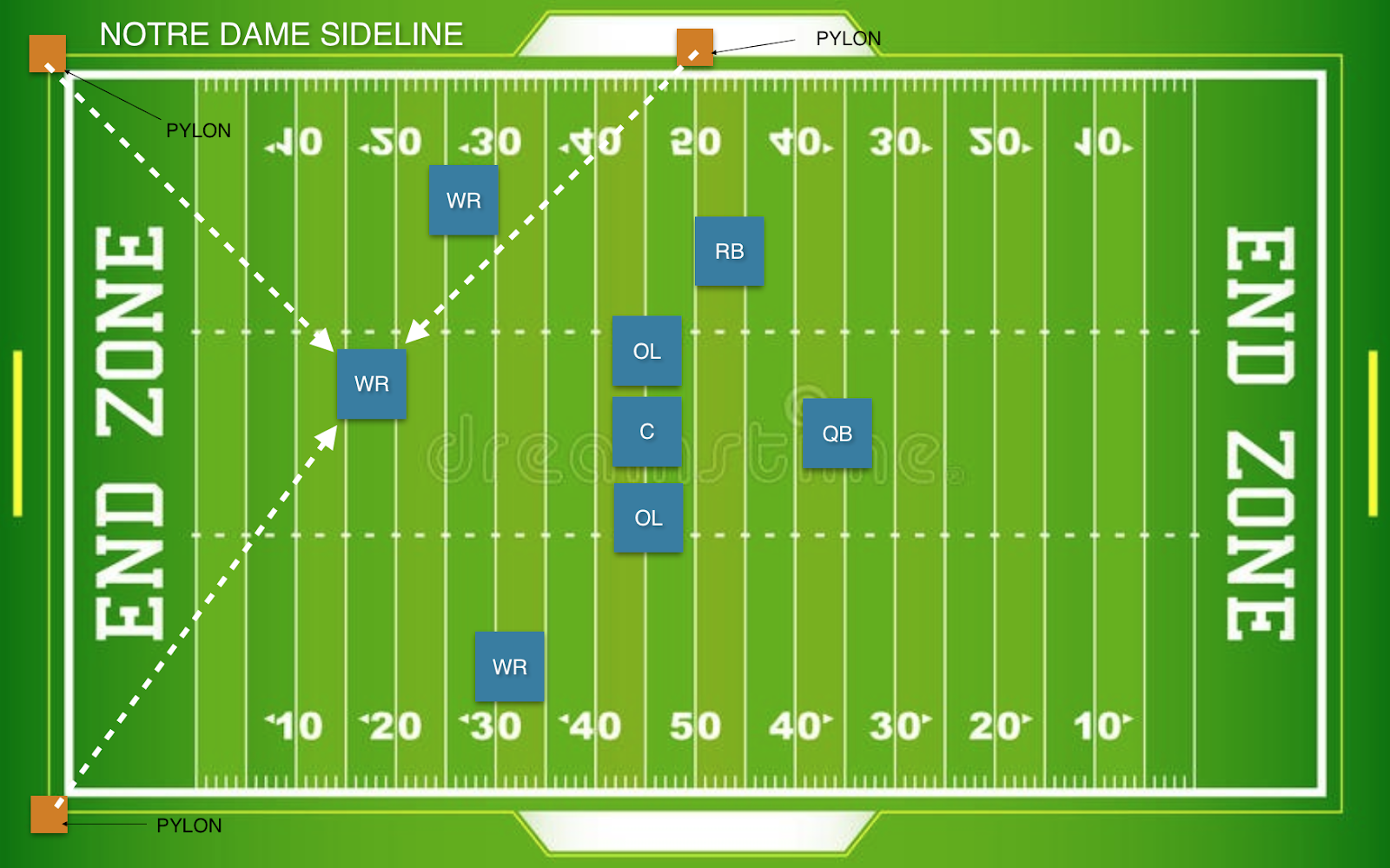 Next year, the project will be taken in house by the RFC in order to put the final touches into the project. A map of every bot on the field, from QB to lineman to receiver, is not far off in the future. The entire system consists of two or more robot players (one quarterback and at least one wide receiver) and three pylons. On each bot and pylon there will be a PCB board housing a microcontroller and a DWM1000 module. The boards can be configured as an Initiator, which is actively tracked, or as a Responder, which stays in one place and is used for positioning calculations. The pylons will be positioned on the Notre Dame sideline and endzone. When a person controlling the quarterback decides to throw a pass to the wide receiver, they will push a button on their controller causing the quarterback to locate the wide receiver using the location system.
Next year, the project will be taken in house by the RFC in order to put the final touches into the project. A map of every bot on the field, from QB to lineman to receiver, is not far off in the future. The entire system consists of two or more robot players (one quarterback and at least one wide receiver) and three pylons. On each bot and pylon there will be a PCB board housing a microcontroller and a DWM1000 module. The boards can be configured as an Initiator, which is actively tracked, or as a Responder, which stays in one place and is used for positioning calculations. The pylons will be positioned on the Notre Dame sideline and endzone. When a person controlling the quarterback decides to throw a pass to the wide receiver, they will push a button on their controller causing the quarterback to locate the wide receiver using the location system.