
Matthew Domenech
After graduation, Matthew will be working in Michigan for Red Rabbit Automation, a small automation startup. He was in charge of the code and website design for this project.
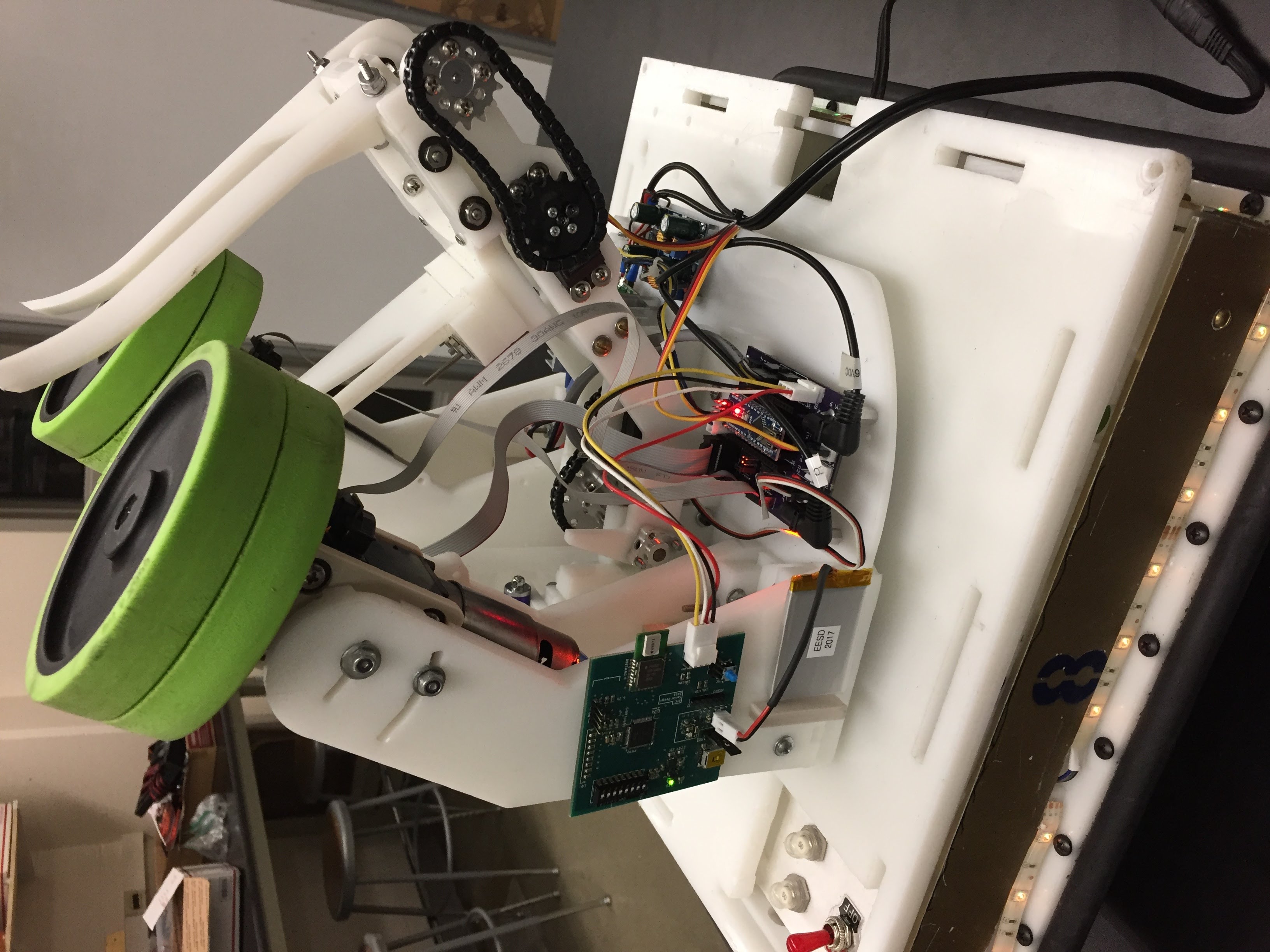
We were tasked with creating an indoor positioning system for the Robotic Football Club. Last year's team had a robust system, but it was not integrated with the QB robot in any way. We streamlined parts of their system, and adapted it to communicate over I2C with the QB in order to make completing a pass easier for the team.
Project Summary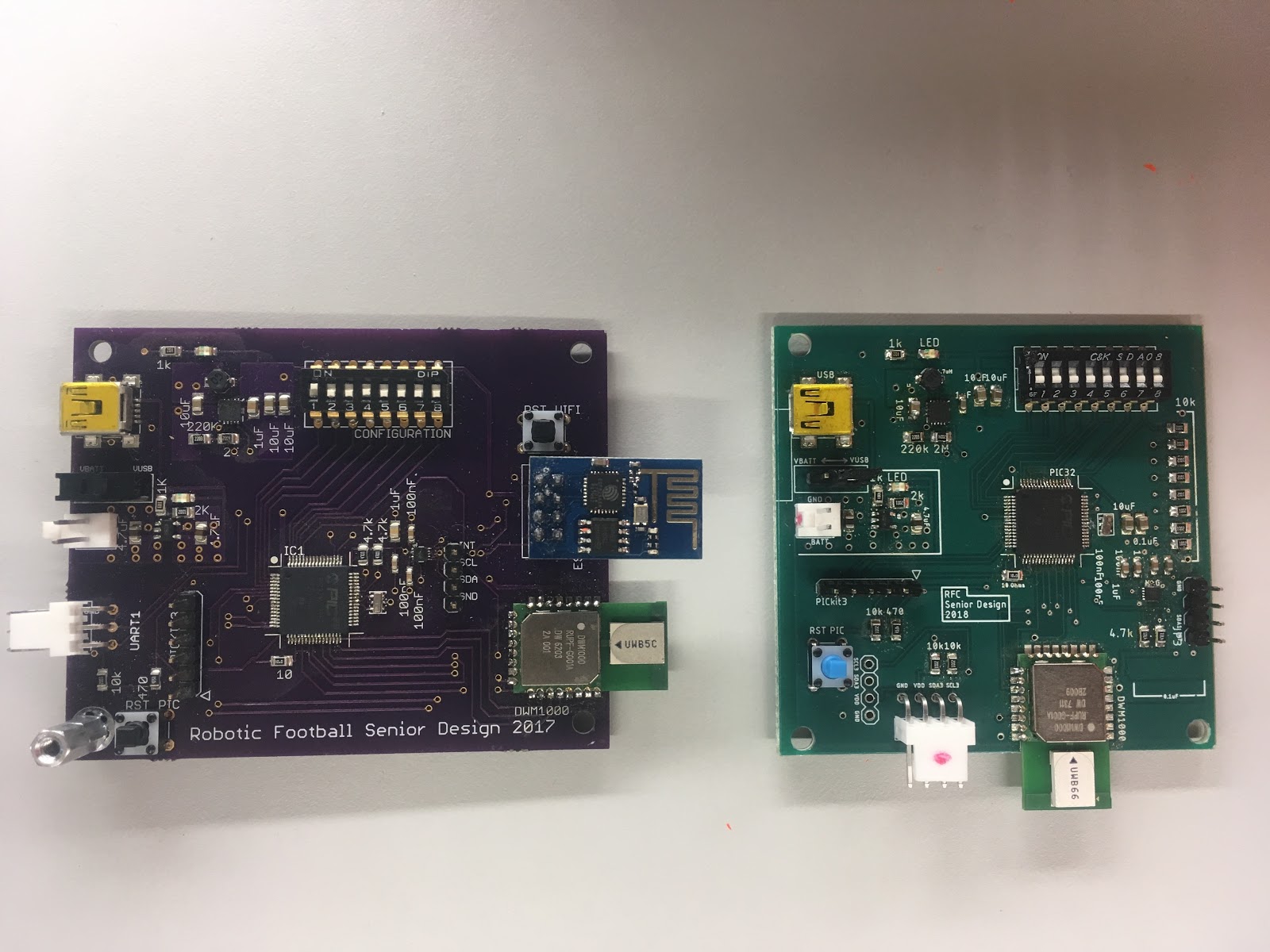
Last year's board included a wifi module that wasn't pertinent to our project. We removed the wifi module and redesigned the board to make it smaller and easier to mount on the bots, and added an I2C port to communicate with the QB. We also created multiple pylons to house the Responders of our positioning system.
Subsystems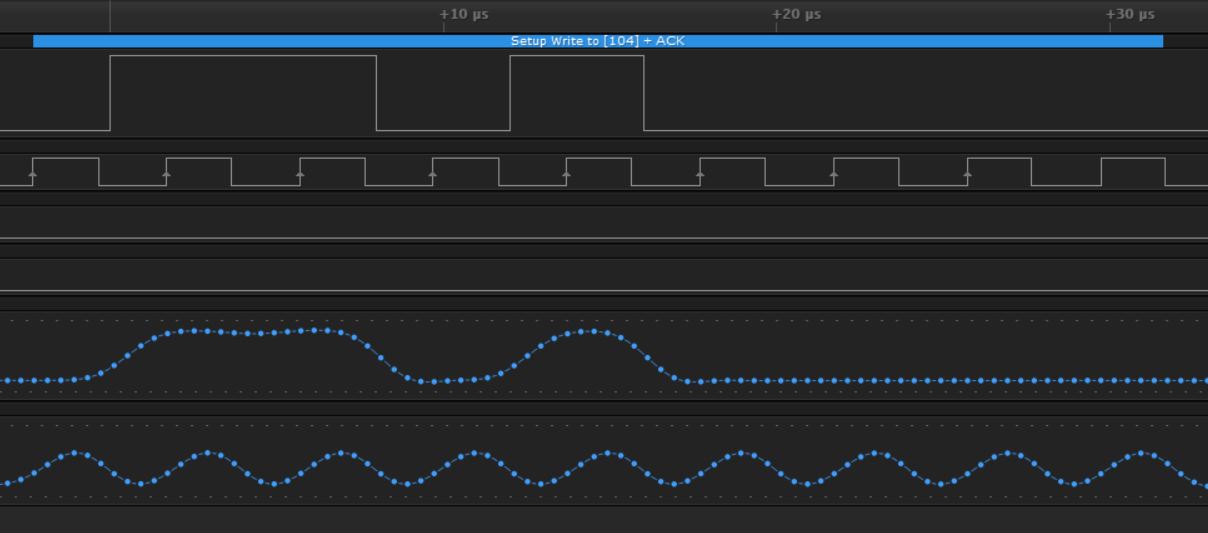
In order to integrate the location system with the QB bot,we wrote new I2C code that could communicate between the PIC32 and Arduino brain of the bot. The Robot Football Club uses I2C protocol to communicate between all of its subsystems on each bot. We chose to utilize the same protocol to make integrating our system as convenient as possible. All code utilized can be accessed on the documentation page.
Documents Page
After graduation, Matthew will be working in Michigan for Red Rabbit Automation, a small automation startup. He was in charge of the code and website design for this project.

Aidan will be working for Lockheed Martin after graduation. Aidan designed the entire new board, and helped with soldering cleanup when putting them together.
Pete will be working for Lockheed Martin after graduation. He was in charge of design the pylons, and did extensive soldering work.

Dan will be working for Booz Allen Hamilton after graduation. His role was logistics and ordering parts.