Ranging
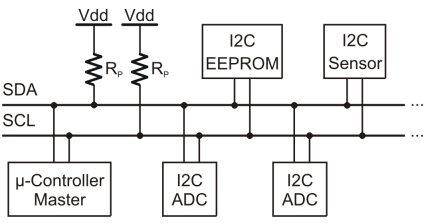
 The ranging subsystem uses RF transmission flight times between two DWM1000 chips to calculate the distance between them. The board configured as the Initiator cycles between up to four different Responders, each with a unique address, to get the distance between itself and the four other boards. The code used to calculate the distances is provided by Decawave, and is available for download from the Decawave Software Page . The DWM1000 is integrated with our PIC32 through an SPI interface.
The ranging subsystem uses RF transmission flight times between two DWM1000 chips to calculate the distance between them. The board configured as the Initiator cycles between up to four different Responders, each with a unique address, to get the distance between itself and the four other boards. The code used to calculate the distances is provided by Decawave, and is available for download from the Decawave Software Page . The DWM1000 is integrated with our PIC32 through an SPI interface.