Design Review 0: January 25, 2024
Agenda:
- Welcome Back!
- Attendance
- Meeting Leader: David
- Minutes: Eric
- Discussion of break progress
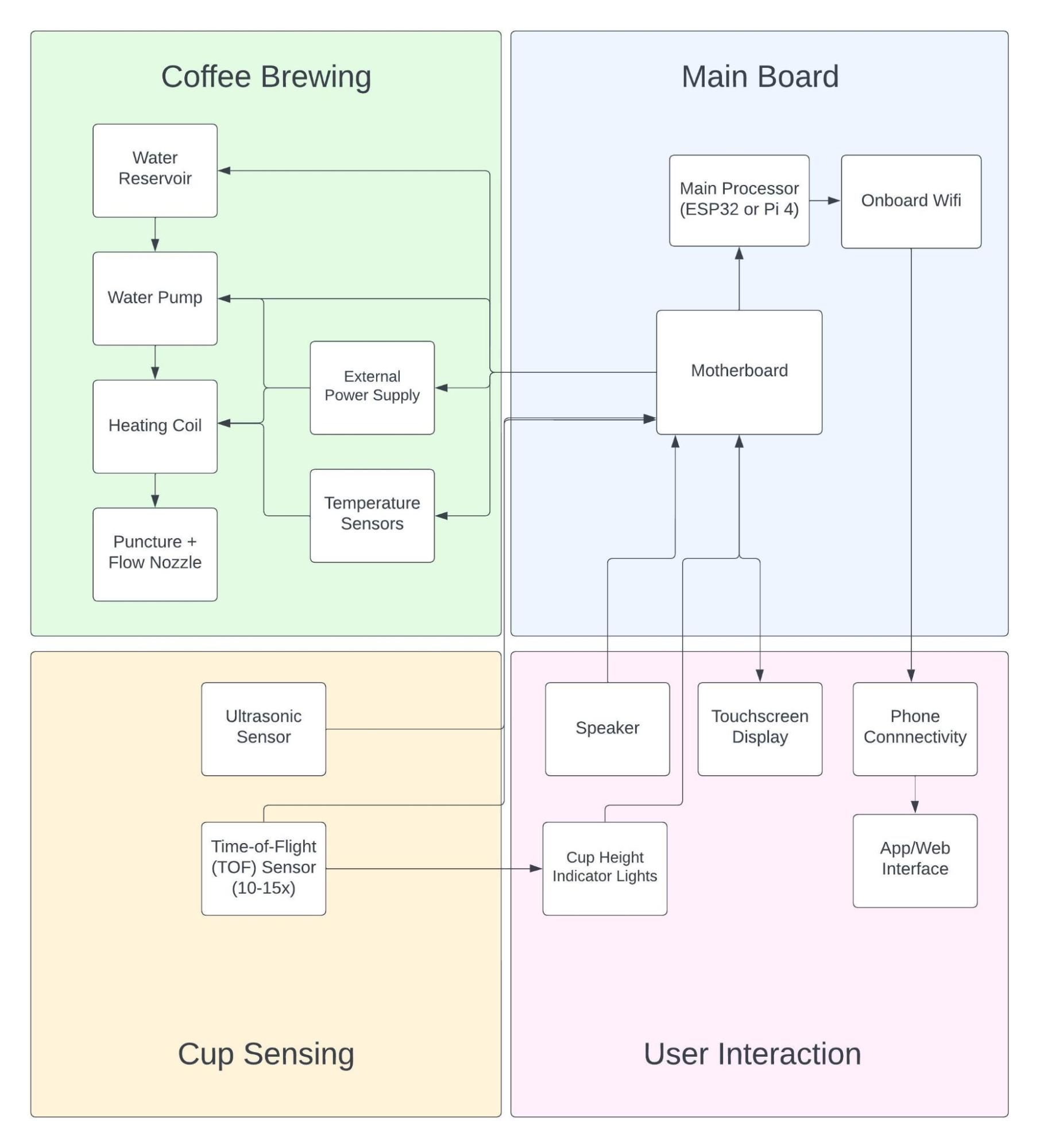
- System Block Diagram
- List of Requirements
- Multiple boards?
- Plan for DR1
- Go through each subsystem
- Plan for DR2
- Demonstrate ability to indicate when a cup is full of liquid
- Via LED
- Demonstration of integration with coffee-maker and ability to start/stop a brew
- Senior Design Site
- How to access
- Details on workings of the site
- Frequency of updates to the site
- Action Items
- What goes on the list?
- Where should it live?
System Block Diagram
Subsystem Requirements
Subsystem 1: Cup Sensing
The cup sensing subsystem is required to 1) determine when a cup has been placed under the nozzle and 2) measure the height of the cup. The system is required to accommodate cylindrical cups as large as 8 inches in height and 4 inches in diameter. The system must also accommodate cups of various colors and textures including translucent cups. The subsystem should also be robust against external factors such as ambient light and sound. This system must not present safety hazards to the user including but not limited to the possibility of laser exposure. Additionally, the system should provide the user with immediate feedback regarding the detection of a cup and its corresponding height. This data must also be provided as inputs to the main board to control the brewing of coffee.
Subsystem 2: Mainboard
This subsystem consists of a custom circuit focused on control and connectivity. At the heart of the board will sit our main processor. Regarding processing, the board is responsible for all of the I/O of the coffee. That is, the mainboard will take in data from the Time-Of-Flight (TOF) sensor, the Ultrasonic sensor, and the touchscreen. The processor is required to interpret this data (i.e. cup height, user preferences, amount of coffee poured) and then use this data to control the output devices in this system. Those devices include the external PSU, water pump, heating unit, temp sensors, indicator lights, and speaker. In addition, the board’s onboard wifi will connect wirelessly to a smartphone through a web or app interface. For the coffee machine to work, the board must be able to process the inputs and control the outputs in real-time; meaning, this machine relies on being able to quickly sense how filled the cup is and control the pouring of coffee instantly.
Subsystem 3: Coffee Pour Tracking
The coffee pour tracking subsystem must periodically measure the height of the liquid inside the cup; relatively frequent measurement is necessary to prevent overflow. This measurement system must accommodate distances between one and eight inches. The system must also be capable of measuring distances to both solids (the bottom of the cup) and liquids and must accommodate a variety of colors and transparencies. The tracking subsystem should be unimpeded by the stream of coffee being poured or the inherent steam produced from brewing hot drinks. The subsystem should also be robust against external factors such as ambient light and sound.
Subsystem 4: User Interaction
The user interaction subsystem requires the ability for users to interact both physically and remotely/wirelessly to begin the brewing process. Regardless of the chosen method, brewing will not commence in the absence of a cup as determined by the cup sensing subsystem. Physically, a button will be implemented to initiate brewing. Remotely, the system should allow a user to initiate brewing from a mobile device. The range of wireless connectivity should allow for remote brew initiation from anywhere within a moderately sized household. The system should also provide visual feedback to the user on the brewing and pouring status (i.e. cup filled percentage) and alert the user when the water tank requires refilling.
Plan for Design Review 1 (Complete Subsystem Design)
Subsystem 1: Cup Sensing
- Determine the sensors used for height and depth detection. Specifically will explore the most viable sensor types and choose the one that is best fit for our machine. Current testing shows that Time-of-Flight sensors are viable, but other options may be explored.
- Advancements made over break - Eric Hawkins:
- Completed proof of concept for cup detection
- Breadboarded design using TCA9548A multiplexor, VL6180 TOF sensors, and indicating LEDs to illustrate the ability to detect different cup heights with multiple sensors
- Completed basic code in Arduino IDE. Speed of multiplexor/TOF sensors was deemed sufficient, main issue was library compatibility.
Subsystem 2: Mainboard/PCB
- Following sensor testing for cup height and liquid level detection, the team will create a bill of materials of required components for our main PCB(s)
- Main parts will include (but are not limited to): microprocessor (i.e. ESP32 or similar), proximity sensors, displays, SMD LEDs, external antenna (if necessary), and coffee maker (built or bought)
- A mainboard plus daughter boards will be designed and built due to the unique design of the coffee maker. At least two distinct PCBs will be required for cup height and liquid detection.
- The number of daughter boards and required connections will be determined from our functionality testing.
Subsystem 3: Coffee Pour Tracking
- The group intends to experiment with both time-of-flight and ultrasonic sensors to find a sensor capable of consistently measuring the distance to a liquid.
- We will experiment with liquids of various colors such as coffee and water to determine the impact of color and transparency on measurement accuracy.
- Current testing shows time-of-flight sensors (particularly the VL6180) are not accurate in measuring water, but are accurate with coffee. Thus, ultrasonics must be explored.
Subsystem 4: User Interaction (Partly OPTIONAL)
- The team aims to create a user interface (UI) that does the following:
- Allows the user to start brewing + pouring with just the push of one button
- Gives the user clear info on the brew status and when the brew is complete
- Different display options will be explored based on technology, available sizes, appearance, compatibility, price, etc. Alongside typical LCDs, “dead front” displays will also be explored due to their simplicity
- (OPTIONAL) The above subsystems serve as the “meat” of our project. In other words, the group intends to prioritize the capabilities above.
- However, if time permits, the group aims to design a methodology for communicating with the coffee maker via Bluetooth or wi-fi. This process for design would be standard as we intend on using a standard module/simple example application.
Key Parts Availability (individual components, no breakout boards)
- Time of Flight Sensor: VL6180 - Mouser
- In practice, these TOF sensors show accuracy across a wide range of cup materials (i.e. ceramic, steel, glass)
- Ultrasonic Sensor: MB1634 - Digikey
- Lead Time is 2 weeks, should be available in time. Looking for the device
- SMT LEDs: 0603 White LED
- A simple LED for indication to the user. Many similar parts are
Similar Projects
Plan for Design Review 2 (Subsystem Hardware Demonstration)
We believe that to demonstrate our hardware system sufficiently, we will demonstrate two different systems that are at the core of our project. Our first goal is to have a system that can first determine the height of a cup placed underneath. Then, one of us will begin pouring liquid into the cup by hand, and when the depth sensor determines the cup is full, an LED will light up. This will demonstrate that we can sense the height of a cup and detect when it is sufficiently filled with coffee.
The second goal is to develop a system that allows us to press a button and begin dispensing coffee, and then press another button and stop the dispensing of coffee. We believe that if we can demonstrate these two abilities, then our project is simply a matter of combining these two processes, putting the electronics on a custom board, and developing a user interface.