Hardware Design
The hardware architecture of the Cheddar Chasers robot is built for modularity and precision. By separating sensing, power management, and logic into distinct sub-systems, we ensured the robot is both resilient to electrical noise and easy to repair during competition.
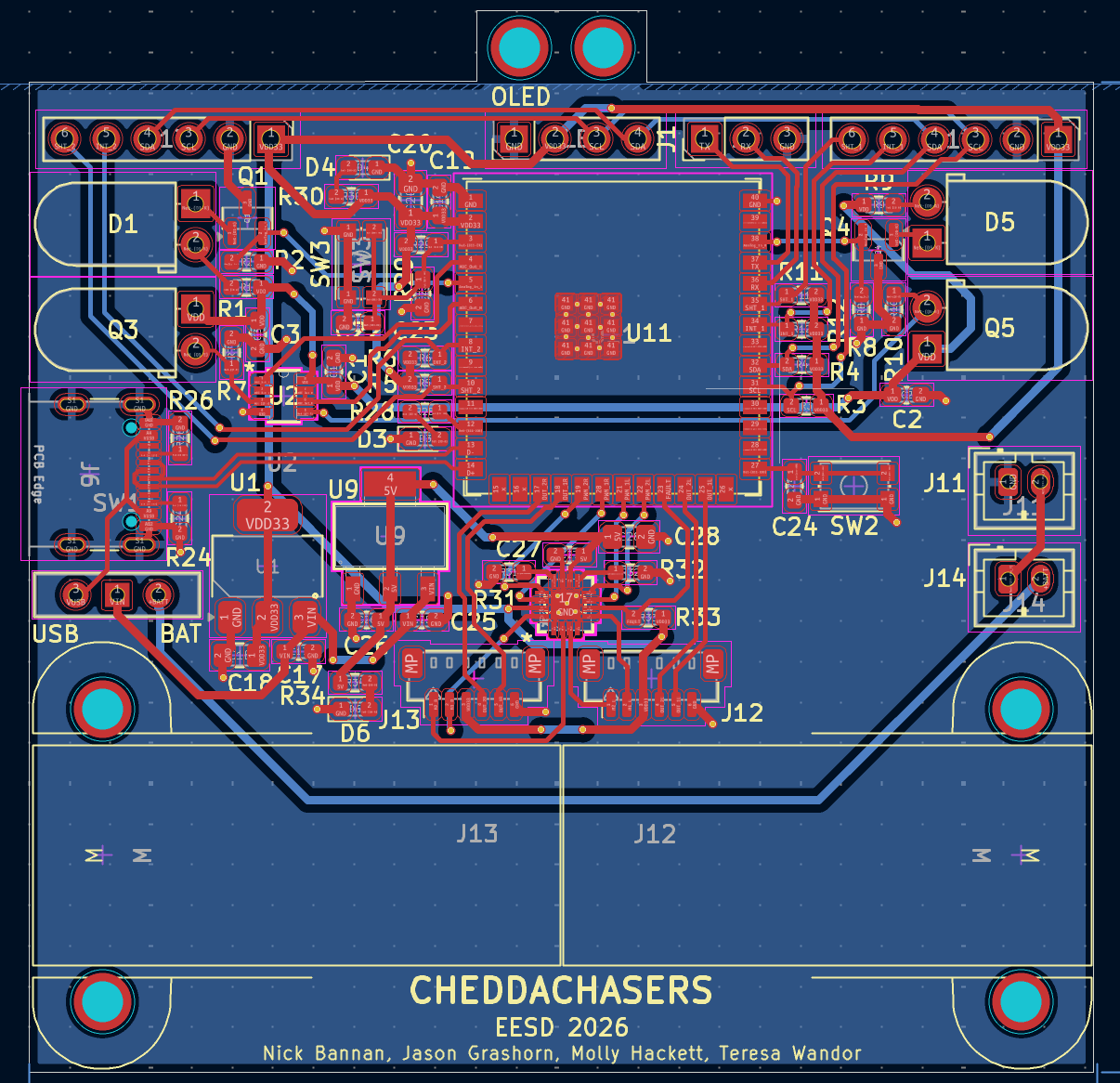
Main Control Board
The central hub of the robot handles high-level logic and signal routing.

Power & Connectivity
Power Source: Fueled by a 3-cell LiPo battery for rapid motor acceleration.
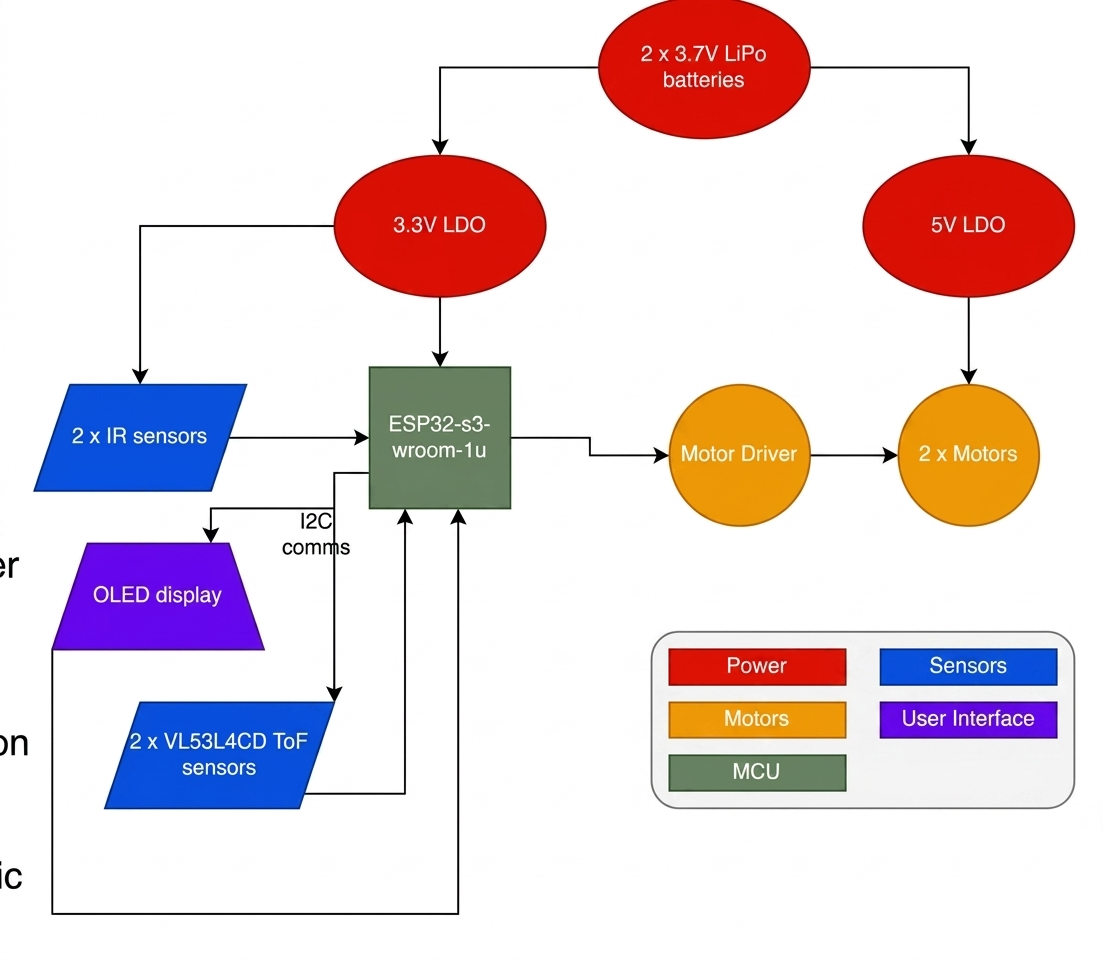
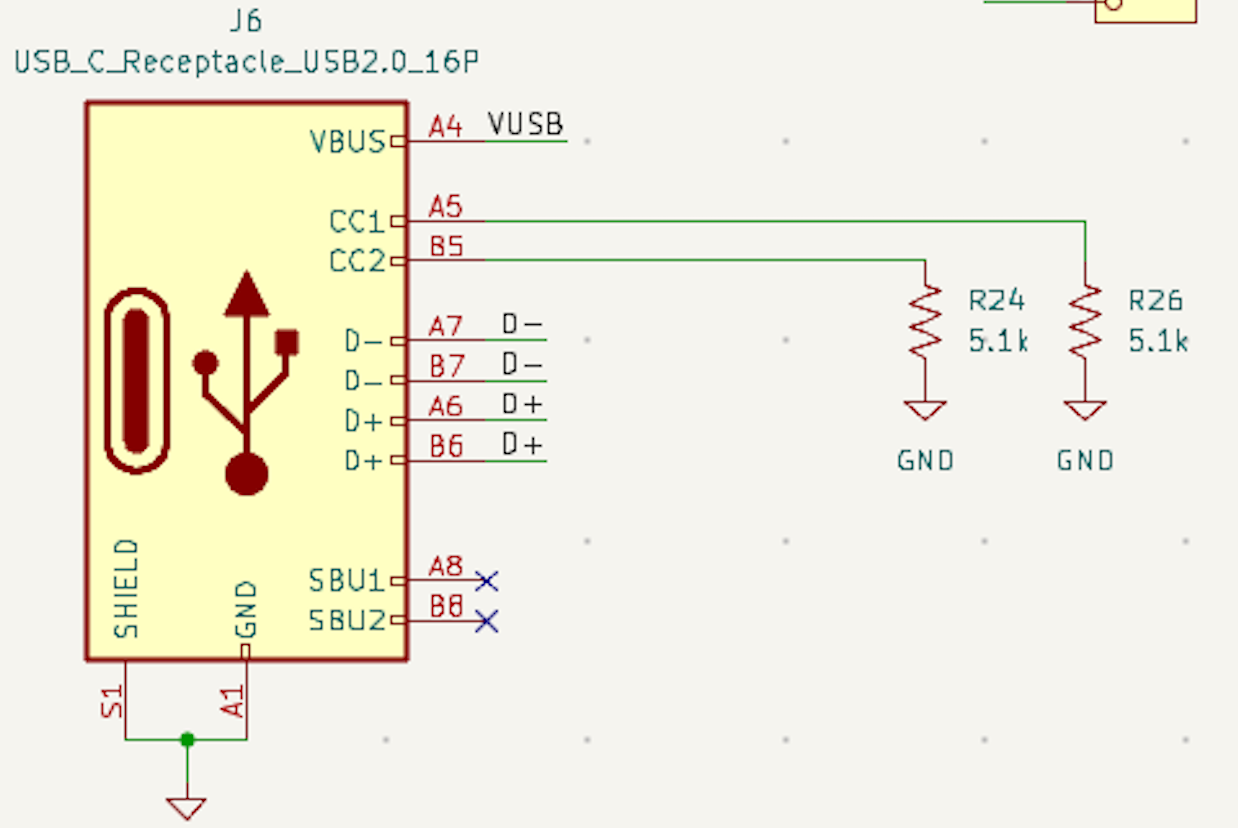
USB-C Connection: Implemented for firmware updates and serial data telemetry.
Actuation
Our drive system consists of precision DC motors equipped with high-resolution encoders.

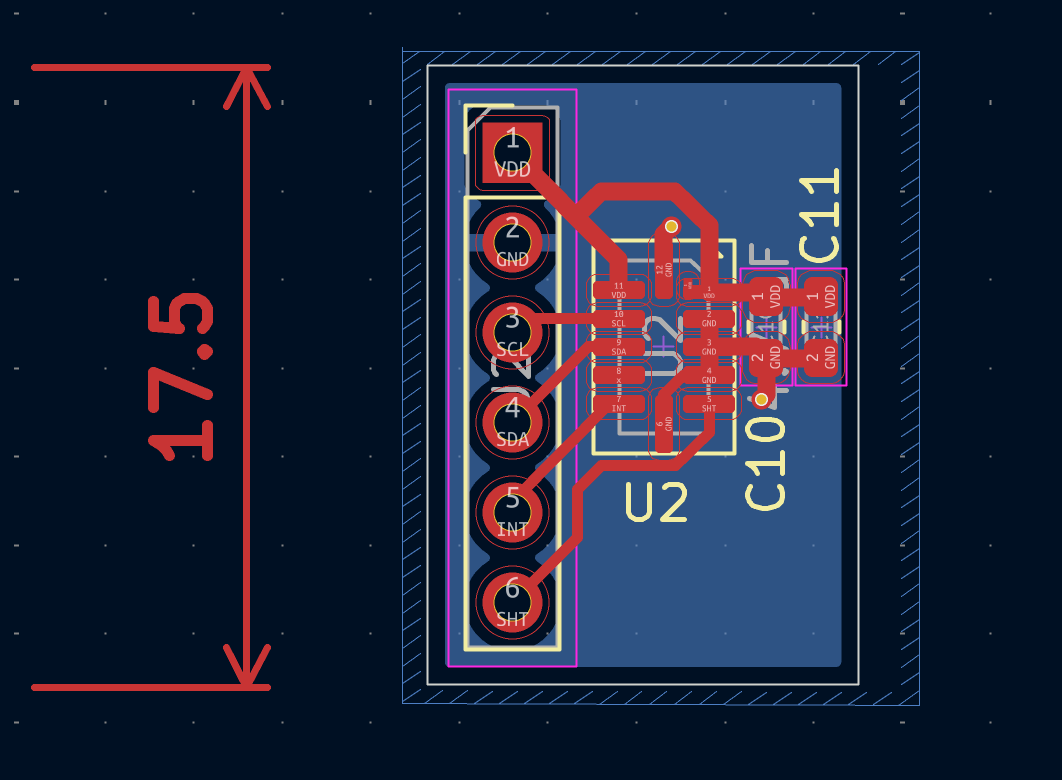
Sensor Suite
IR Sensors: Custom array for short-range proximity detection.

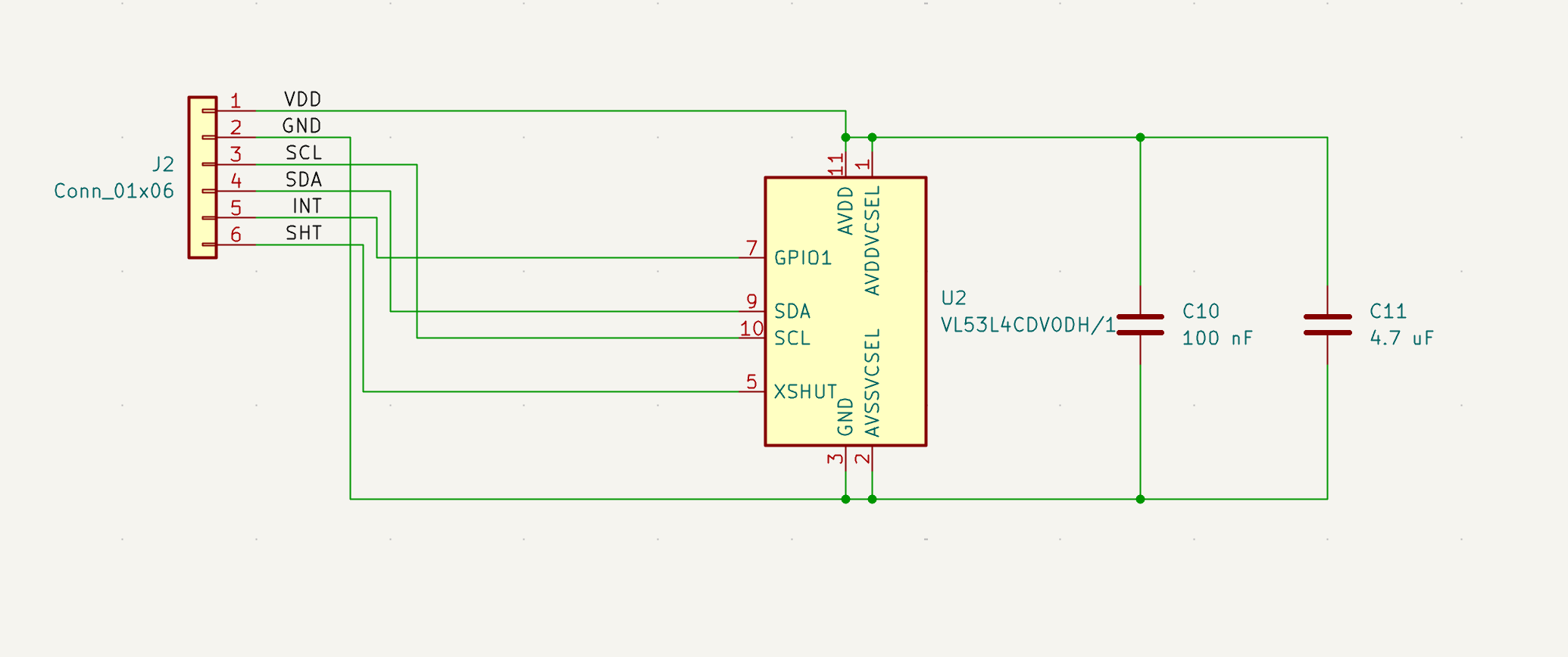
Time of Flight (TOF) System: Millimeter-accurate distance readings for obstacles.
Conclusion
The resulting hardware platform provides a stable, low-latency environment for our control algorithms.